cca_robotics_2021
Course materials for CCA high-school robotics class, academic year 2021-22.
Project maintained by buffetboy2001 Hosted on GitHub Pages — Theme by mattgraham
Drive System Wiring
Module Goal: wiring the robots drive system to the Raspberry Pi.
Drive Wheel Assembly Steps
- On the L298N Motor Controller board, identify the wire ports labeled:
- OUT1, OUT2, OUT3, & OUT4
- NOTE: Make sure at least two teammates can find them.
- Using a screwdriver, loosen the screws in the terminal blocks labeled OUT1, OUT2, OUT3, and OUT4.
- With one wheel motor, insert the ends of the two wires into OUT1 & OUT2
- Do this again with the other motor and OUT3 & OUT4
- Connect the wires from the battery holder to the L298N Motor Controller board.
- Black wire to GND
- Red wire to 12V
- Tighten all screws gently so that the wires stay in-place.
Battery Assembly
The Raspberry Pi computer can only provide so much electrical energy to other things connected to it. In the case of the L298N motor controller and the wheels, they need more electricity than the Pi can give. :(
No worries! You’ll fix this problem by also connecting a 12 volt rechargeable battery to the L298N and use that to power the wheels.
- On the L298N Motor Controller board, identify the wire ports labeled:
- 12V & GND
- NOTE: Make sure at least two teammates can find them.
- Grab the 12 volt battery case and connect the wires from it to the L298N:
- the Red wire on the AA battery case to 12V
- the Black wire on the AA battery case to GND
- Tighten all screws gently so that the wires stay in-place.
Connect the Raspberry Pi to your Components
Time to get your components connected to the robot brain – the Raspberry Pi!
NOTE: Always keep your Pi turned OFF when connecting wires!
Get 5 female-to-female wires. If that are connected together along their length, gently pull them apart.
- On your L298N Motor Controller board, identify IN1, IN2, IN3, IN4.
- Connect the 4 wires to each of the INs.
As a team, get your Raspberry Pi and observe the following picture. Make sure it makes sense when you look at the Pi. Talk through the ports labeled GPIO and Ground.
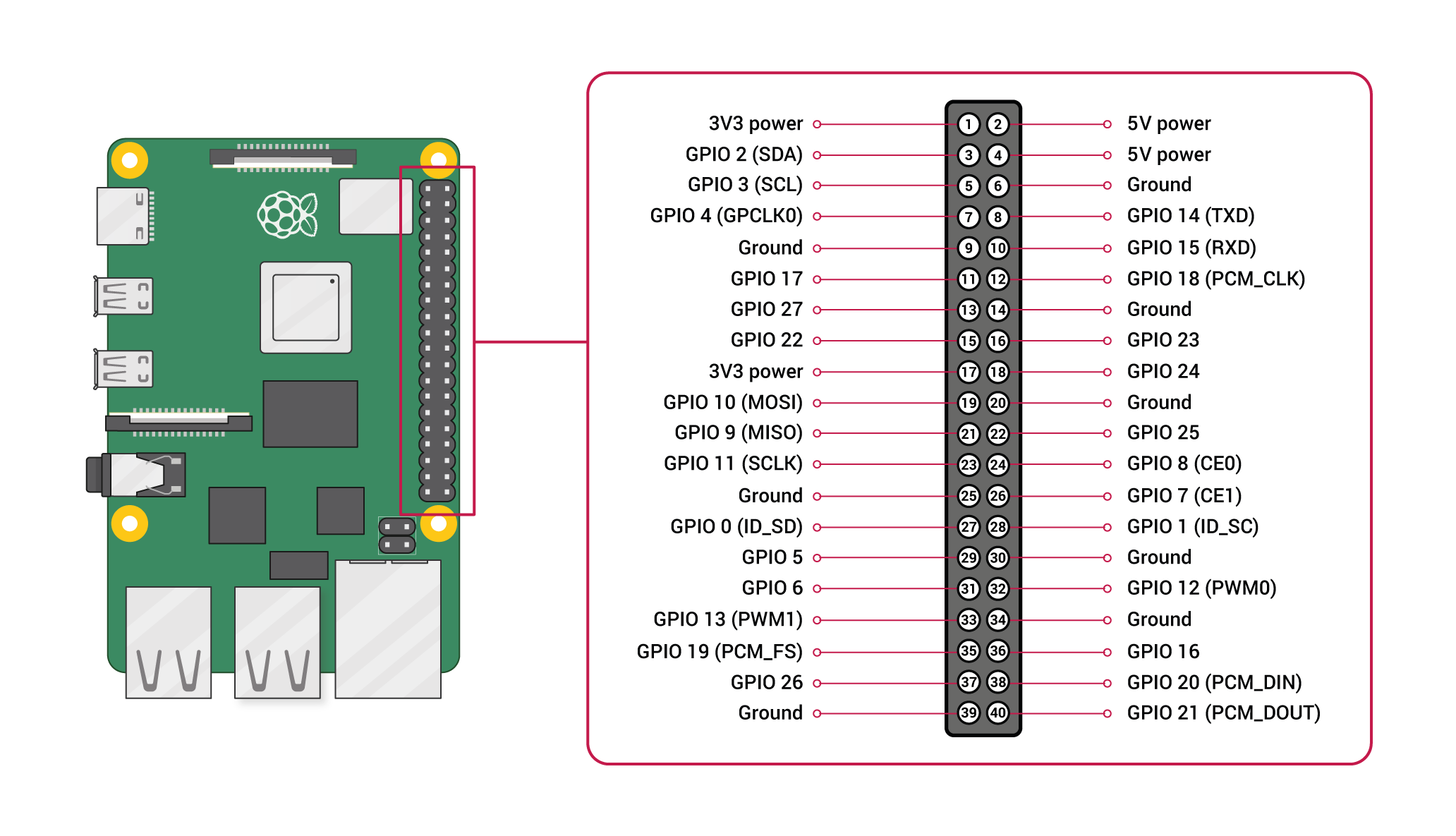
Now, make the following connections.
| L298N Connection Pin | Raspberry Pi Connection Pin |
|---|---|
| IN1 | GPIO 7 |
| IN2 | GPIO 8 |
| IN3 | GPIO 9 |
| IN4 | GPIO 10 |
| GND | Ground (there are several; chose any you like) |
Now your Raspberry Pi and your L298N Motor Controller board are connected!
The L298N Motor Controller Board should be looking like this:
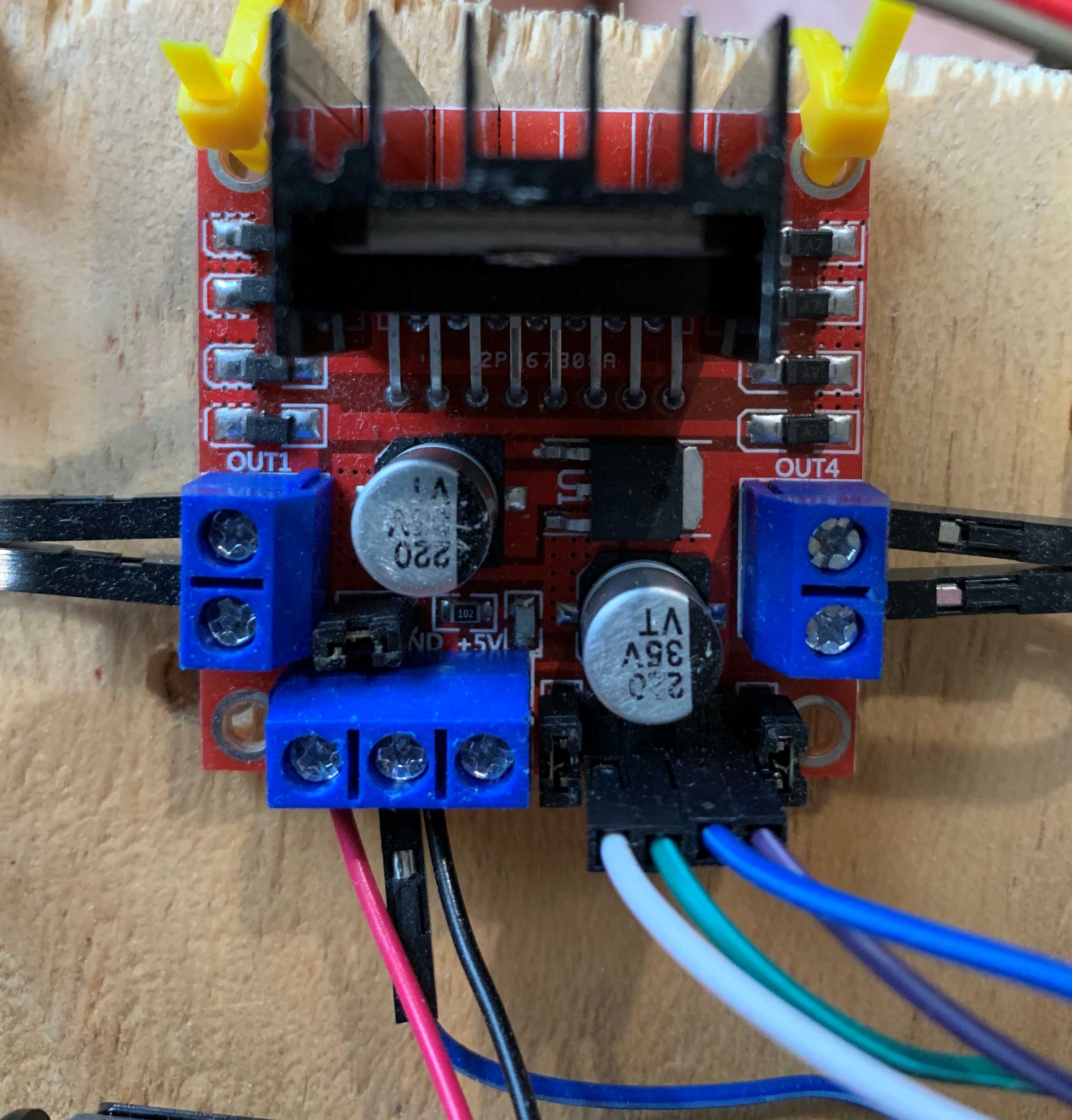
If you’re not sure, ask Mr. Bowman for a double-check!
Turn the 12 volt battery on so that the L298N Motor Controller board has electrical power. It should have a bright red light if you’ve got the batteries connected correctly.
Not working? Double-check your wire connections from above.
~Module Complete~